MIL-G-46858A
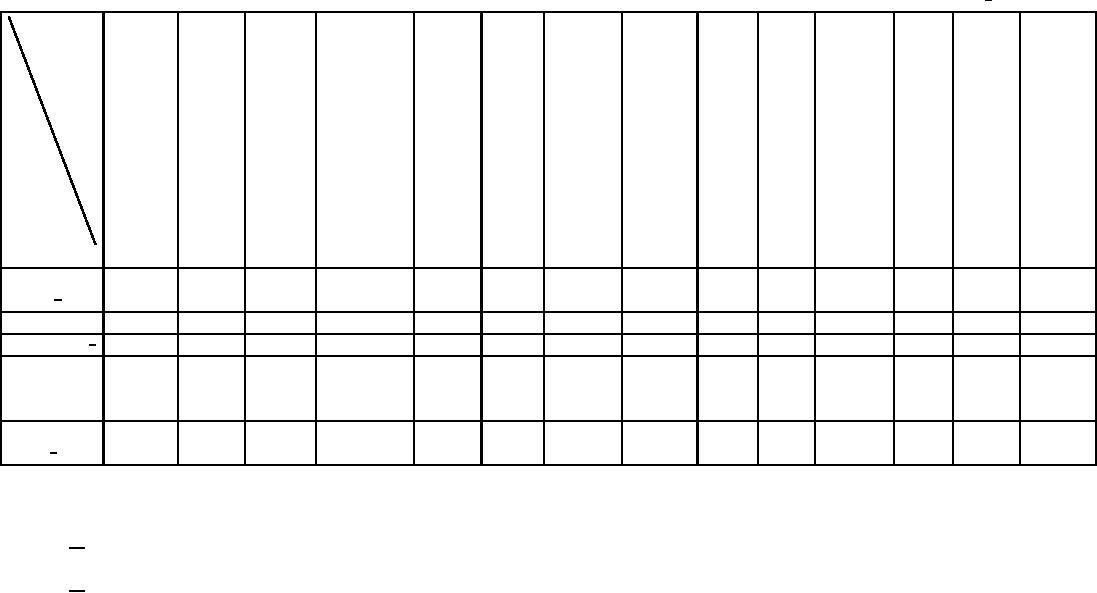
TABLE I - B
GYRO PARAMETERS FOR PLATFORM MOUNTED - LONG TIME, MILD ENVIRONMENT APPLICATIONS /1
Ac-
Damp- Char- Vehicle Slaving Com- Drift Random Ac-
Slaving
Sensor Switch Natural
Input
celer- celer-
acter- Induced Rate
posite Rate Drift
Error
Operat Frequency ing
Ranges Gain
Parameter
ation ation-
Rate
Acceler
istic
Ratio
-ing
-
Insen-
-ation
Error
Point
Sensi sitive
Time Effects
-tive
Drift
Drift
Rate
Rate
Gyro
Type
Directional
Gyro /2
Free Gyro
X
X
X
N
X
S
S
/2
Rate Gyro
Rate
X
X
X
X
X
X
S
S
Integrating
Gyro
Vertical
Gyro/2
NOTES:
N - Parameter specified when no torquer is used; S - Parameter stability specified in addition to its absolute value; X - Parameter
specified
/1 - Defined as gyros mounted in a servo-stabilized, external gimbal system used in cruising missile flight environments, i.e., times
generally longer than 15 minutes and accelerations greater than 3 g's.
/2 - Generally not applicable.
16
For Parts Inquires call Parts Hangar, Inc (727) 493-0744
© Copyright 2015 Integrated Publishing, Inc.
A Service Disabled Veteran Owned Small Business